
「Worldskills Mobile Robotics Shanghai 2022」の
『LabVIEW版 VMXコントローラ 導入マニュアル』検証シリーズ第4弾!!
メカやエレに疎いスタッフSが、今日はエンコーダの接続に挑戦しました!!

今日のミッションは「エンコーダを取り付ける」ことなんですが・・・
そもそも「エンコーダ」って何ですか?(;'∀')
マニュアルには、「コントローラにフィードバックを行うために、モーター・シャフトに取り
付けられたセンサ」であり、「モーション・コントロールするための位置、速度、方向が検出
できる」とあります。
もう少しわかりやすく言うと、走行した距離がわかるそうなんです!

まずは、エンコーダの中継ボードに付属のケーブルを取り付けました。
前回、黒い線はGNDと習ったので、どの向きで取り付ければよいのかな・・・と
思いましたが、取り付け口の形状に従って迷うことなく取り付けできました。

次にケーブルの反対側をVMXコントローラに取り付けます。
どのポートにつなぐかは決まっていないようですが、ポートが4つあるので、
各モーターに対応するよう、間違えないように順番を決めて接続したほうが良いようです。

エンコーダの中継ボードの反対側にエンコーダのケーブルを接続しました。
ここで注意するのは、4色のケーブルを挿す順番です!!
最初に挿した右側ケーブルとケーブルの色の順番が反対になっています。
(なぜなんでしょう??)
右側は上から黄、青、赤、黒ですが、左側のケーブルは下から黄、青、赤、黒となっています。
左側のケーブルは一本ずつ挿す形状になっていますので、順番を確認しながら挿してください。
ちなみに、なぜ左側には黒いケーブルを一番上に挿しているかというと、紫色の基盤の裏面を
見ると、一番上にGNDと書いてあるのでそれに従っています。
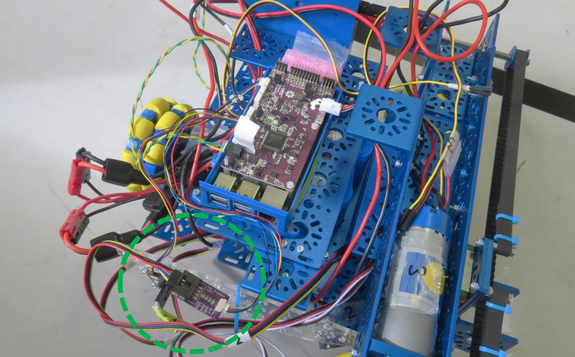
ロボットに取り付けたところこのような状態になりました。
少しわかりにくいですが、緑色の点線の丸の中がエンコーダ―の中継ボードです。
取り付けたばかりで宙に浮いた状態です。
これはどこかに固定したほうがいいのかな??思案中です。

早速取り付けたロボットを動かしてみました!
1回転のエンコーダ・カウント数が1440なので、それを使って距離を計算するプログラムを
ロボットに書き込みます。
今回は3輪のロボットなので、前輪が2回転で約55cm進み、停止しました。
皆さんもやってみてください。